
دکتر نسرین کلامیان
عضو هیات علمی دانشگاه تفرش
گروه مهندسی برق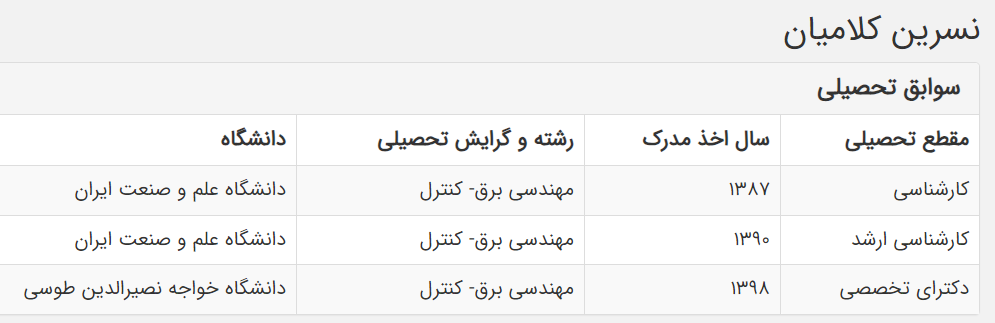
Direct power control of DFIG by using nonlinear model predictive controller N Kalamian, M Verij Kazemi, SA Gholomian Asian Journal of Control 18 (3), 985-999 | 24 | 2016 |
N Kalamian, H Khaloozadeh, SM Ayati ISA transactions | 14 | 2019 |
Dynamic walking of biped robots with obstacles using predictive controller N Kalamian, M Farrokhi 2011 1st International eConference on Computer and Knowledge Engineering … | 13 | 2011 |
State-Dependent Impulsive Observer Design for Nonlinear Time-Delay Systems N Kalamian, H Khaloozadeh, M Ayati Control, Instrumentation, and Automation (ICCIA), 2017 5th International … | 12 | 2017 |
Design of State-Dependent Impulsive Observer for Nonlinear Time-Delay Systems N Kalamian, H Khaloozadeh, M Ayati IET-Control Theory and Applications 13 (18), 3155 –3163 | 9 | 2019 |
Stepping of biped robots over large obstacles using NMPC controller N Kalamian, M Farrokhi The 2nd International Conference on Control, Instrumentation and Automation … | 8 | 2011 |
N Kalamian, M Faraji Niri, H Mehrabizadeh ICCIA 2019 | 5 | 2019 |
Design of adaptive state-dependent impulsive observer for nonlinear time-delay systems N Kalamian, H Khaloozadeh, M Ayati 2019 27th Iranian Conference on Electrical Engineering (ICEE), 885-890 | 4 | 2019 |
V Afshari, MF Niri, N Kalamian 2020 28th Iranian Conference on Electrical Engineering (ICEE), 1-6 | 3 | 2020 |
N Kalamian, M Faraji Niri, M Massomfar ICCIA 2019 | 3 | 2019 |
N Kalamian, M Faraji-Niri 2021 7th International Conference on Control, Instrumentation and Automation … | 2 | 2021 |
N Kalamian, H Khaloozadeh, M Ayati Journal of Control | 2 | 2021 |
Dynamic Walking and Stepping over Large Obstacles of Biped Robots: A Poincaré Map Approach N Kalamain, M Farrokhi The Journal of Engineering Science and Technology Review (JESTR) 15 (6), 186 … | 1 | 2022 |
N Kalamian, H Khaloozadeh, M Ayati International Journal of Dynamics and Control | 1 | 2022 |
N Kalamian, A Keshavarz-Mohammadiyan The 9th International Conference on Control, Instrumentation, and Automation … | 2023 | |
N Kalamian, H Khaloozadeh, SM Ayati Journal of Control 15 (1) | 2021 | |
کاربرد شبکه عصبی مصنوعی در مدل سازی و شناسایی ایستگاه پمپاژ آب شرب شهری H Karimnezhad, N Kalamian National Conference on Technology in Electrical and Computer Engineering | 2018 | |
طراحی رویتگر ورودی ناشناخته برای تشخیص و جداسازی عیب سنسور در ربات دوپا A Amrayi, N Kalamian Control, Instrumentation, and Automation (ICCIA) , 2017 5th International … |
طراحی و تحلیل کنترلکننده تطبیقی پیشبین مدل مبنا برای ربات دوپا در حضور موانع
چکیده پروژه
این پژوهش به بررسی و طراحی کنترلکننده تطبیقی پیشبین مدل مبنا برای رباتهای دوپا میپردازد که یکی از چالشبرانگیزترین حوزههای تحقیقاتی در دو دهه اخیر است. رباتهای دوپا به دلیل ذات ناپایدار خود، علاوه بر کنترل حرکت، نیازمند کنترل تعادل نیز هستند که این مسئله، کنترل آنها را بسیار پیچیدهتر از رباتهای چرخدار میکند. با این حال، رباتهای دوپا به دلیل توانایی حرکت در سطوح گسسته مانند پلهها، سطوح ناهموار و عبور از موانع، توجه بسیاری از محققان را به خود جلب کردهاند.
هدف اصلی این پروژه، طراحی و پیادهسازی کنترلکنندهای است که بتواند حرکت ربات دوپا با پنج درجه آزادی را روی سطوح صاف و در عبور از موانع مختلف کنترل کند.
مزایای استفاده از کنترلکننده پیشبین غیرخطی
- طراحی الگوی حرکت بهصورت ضمنی و بیدرنگ:
- این روش به کنترلکننده اجازه میدهد تا مسیرهای مرجع برای مفاصل ربات را با در نظر گرفتن گشتاورها و محدودیتهای عملیاتی تولید کند.
- دید بهینه و مدیریت قیدها:
- کنترلکننده پیشبین میتواند قیدهای مسئله حرکت ربات دوپا را بهصورت بهینه در نظر بگیرد.
- مقابله با اغتشاشات ضربهای:
- از پتانسیل کنترل پیشبین برای دفع اثر اغتشاشات ناگهانی و ضربهای استفاده شده است.
چالشهای مدلسازی و راهحل پیشنهادی
- چالش مدلسازی:
کنترلکننده پیشبین بر اساس مدل دینامیکی ربات عمل میکند، اما به دلیل وجود عدمقطعیتها، مدل دقیقی از ربات در دسترس نیست. - راهحل:
برای مقابله با این عدمقطعیتها، از شبکههای عصبی استفاده شده است تا مدل دینامیکی ربات بهصورت قطعی شناسایی شود.
ساختار پروژه
- فصل اول:
- بررسی اجمالی کارهای انجامشده در زمینه کنترل رباتهای دوپا.
- فصل دوم:
- تعاریف و مسائل مهم مرتبط با رباتهای دوپا.
- فصل سوم:
- توضیح اصول کنترل پیشبین.
- فصل چهارم:
- تحلیل دینامیک ربات و طراحی کنترلکننده برای حرکت در سطوح صاف و عبور از موانع.
- فصل پنجم:
- شناسایی مدل دینامیکی ربات با استفاده از شبکه عصبی.
- فصل ششم:
- تحلیل پایداری ربات با استفاده از نگاشت پوانکاره در حضور کنترلکننده پیشبین و شبکه عصبی.
- فصل هفتم:
- جمعبندی و نتیجهگیری.
نتایج و دستاوردهای پروژه
- طراحی و پیادهسازی کنترلکننده پیشبین غیرخطی که توانایی مدیریت حرکت و تعادل ربات دوپا را در شرایط مختلف دارد.
- استفاده از شبکههای عصبی برای رفع عدمقطعیتهای مدل دینامیکی.
- تحلیل پایداری ربات با روش نگاشت پوانکاره، که نشاندهنده قابلیت اطمینان کنترلکننده در شرایط مختلف است.
اطلاعات تکمیلی
- دانشجو: نسرین کلامیان
- استاد راهنما: دکتر محمد فرخی
- استاد مشاور: دکتر علیرضا محمد شهری
- هیات داوری: دکتر جواد پشتان، دکتر محمد تشنهلب
- تاریخ دفاع: یکشنبه 11/10/90، ساعت 13
- محل: سالن 303، دانشکده مهندسی برق
این پروژه با تمرکز بر کنترل پیشرفته رباتهای دوپا و استفاده از روشهای نوین هوش مصنوعی مانند شبکههای عصبی، گامی مهم در توسعه رباتیک و کنترل سیستمهای پیچیده برداشته است.






نظر شما